Forget Everything About Dot and Cross Products. There's a Much Better Way
An introduction to geometric algebra that unifies the dot product and cross product into a single elegant geometric product, revealing that vectors are best understood not as arrows but as mirrors for reflections.
In traditional linear algebra courses, we learn two separate operations on vectors: the dot product (which yields a scalar) and the cross product (which yields a vector). But there exists a single, universal, and elegant geometric product that encompasses both — and much more. This article is an invitation to rethink everything you thought you knew about vector multiplication.
Part 1: The Philosophy
The central idea can be stated simply: a vector is not an arrow — it is a mirror. Every vector defines a reflection, and all the familiar operations (dot product, cross product, rotation) follow logically from a single postulate.
Part 2: The Single Postulate
The entire framework rests on one axiom: the product of a vector with itself equals the square of its length:
v * v = |v|^2

From this single rule, combined with distributivity and associativity, we can derive everything else.
Part 3: Deriving the Dot Product
Consider the product (a + b)(a + b) = |a + b|^2. Expanding and using our postulate:
a*a + a*b + b*a + b*b = |a|^2 + 2(a . b) + |b|^2
This gives us: a*b + b*a = 2(a . b)
The symmetric part of the geometric product is the dot product.


Part 4: The Wedge Product and Bivectors
The antisymmetric part gives us something new: a*b - b*a = 2(a wedge b)
This "wedge product" produces a bivector — a new kind of mathematical object that represents an oriented plane area, not a vector. Think of it as the parallelogram spanned by a and b.

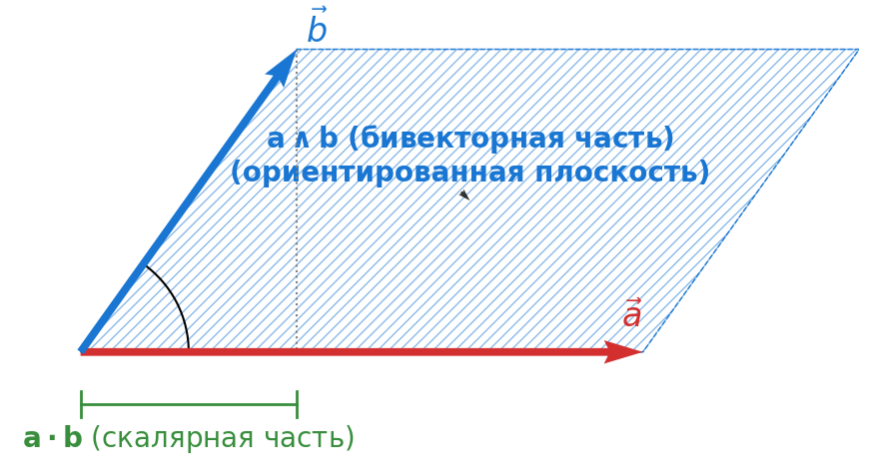
So the full geometric product decomposes as:
a*b = (a . b) + (a wedge b) = scalar + bivector

Part 5: Orthogonal Vectors
When two vectors are perpendicular, their dot product vanishes: a . b = 0. In this case, the geometric product is purely a bivector: a*b = a wedge b. Moreover, for perpendicular vectors: a*b = -b*a (they anticommute).

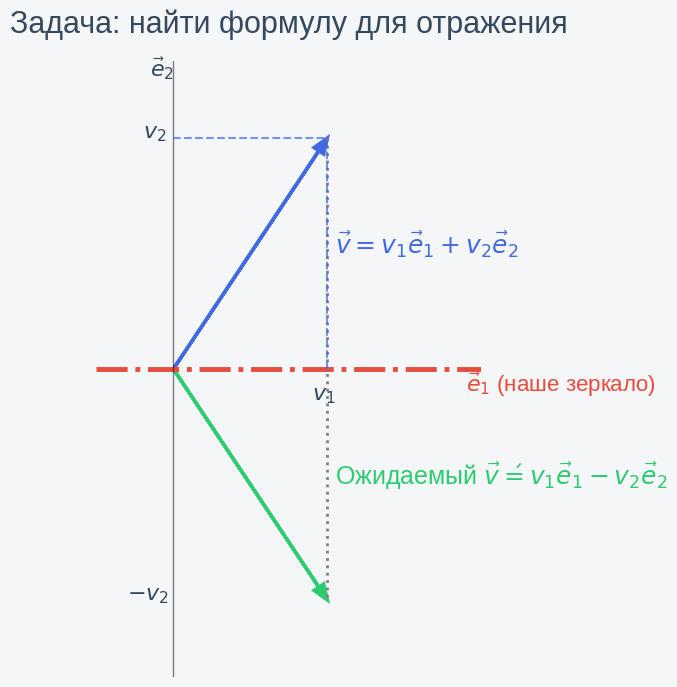
Part 6: Reflections — The Core Operation
Here's where the "vector as mirror" idea becomes concrete. To reflect a vector v across the hyperplane perpendicular to a unit vector a, we use the sandwich product:
v' = a * v * a
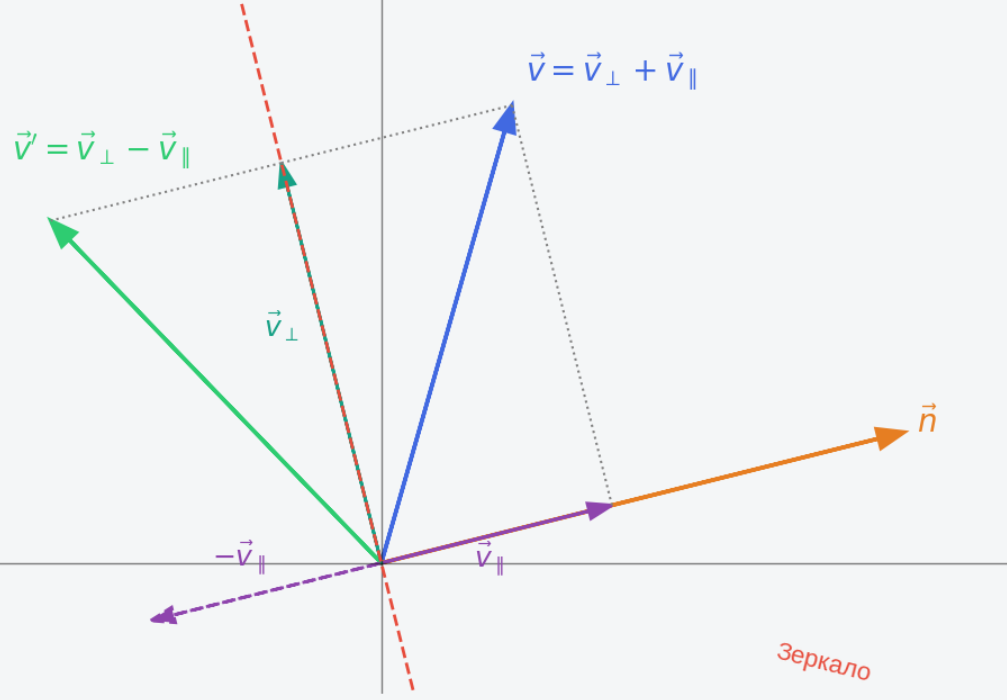
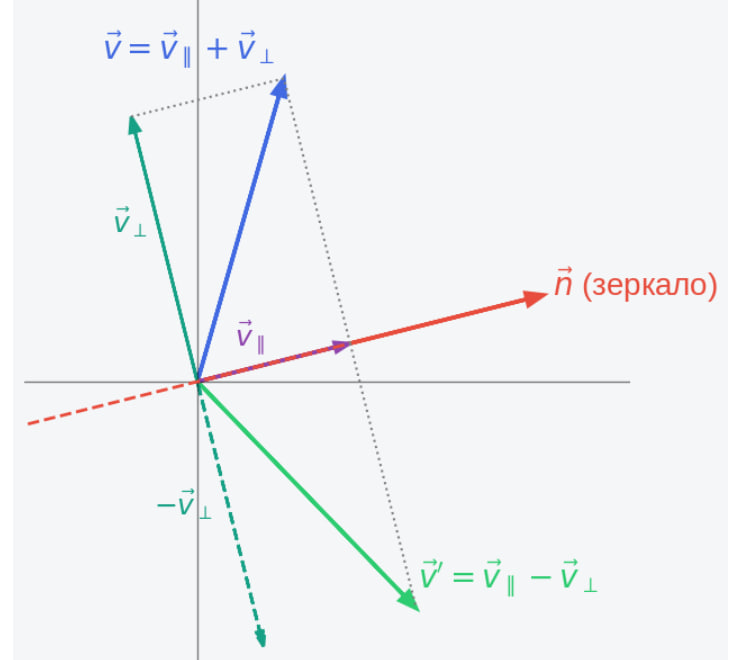
This single formula replaces the cumbersome reflection matrices from linear algebra. The vector a acts as a mirror, and the sandwich product performs the reflection.

Part 7: Rotations from Double Reflections
A remarkable fact from geometry: two successive reflections produce a rotation. If we reflect first across vector a and then across vector b, we get:
v' = b * (a * v * a) * b = (b*a) * v * (a*b) = R * v * R^(-1)
where R = b*a is called a rotor. The angle of rotation is twice the angle between a and b.


This is far more elegant than rotation matrices and naturally generalizes to any number of dimensions — unlike the cross product, which only works in 3D.
Part 8: Why the Cross Product Is a 3D Accident
In 3D, there's a coincidence: bivectors and vectors are both 3-component objects. This lets us "convert" a bivector to a vector (its dual), which is exactly what the cross product does. But this is a mathematical crutch — an accident of three dimensions.
In 2D, bivectors are scalars (one component). In 4D, bivectors have 6 components. The cross product simply doesn't generalize, while the wedge product works perfectly in any dimension.


Part 9: Connection to Pauli Matrices
Perhaps the most surprising result: if we take three orthogonal unit vectors e1, e2, e3 in geometric algebra and write out their multiplication rules:
- e_i * e_i = 1
- e_i * e_j = -e_j * e_i (for i != j)
These are exactly the defining properties of the Pauli matrices from quantum mechanics! The matrices sigma_1, sigma_2, sigma_3 are simply a matrix representation of orthogonal basis vectors in geometric algebra.


Geometric algebra didn't just unify the dot and cross products — it revealed that the mathematical framework of quantum spin was hiding inside vector algebra all along.


Practical Significance
Geometric algebra provides:
- A single product that unifies dot and cross products
- Reflections and rotations without matrices
- Formulas that work in any number of dimensions
- A natural path from classical vectors to quantum mechanics
- Bivectors as first-class objects representing oriented areas and rotation planes

The next time someone asks you about the dot product or the cross product, you can tell them: forget both. There's a single, unified, and far more elegant way to multiply vectors — the geometric product.